
【導讀】本篇文章說的是采用Android手機為控制中心,搖桿手柄為輸入設備實現了移動機械手的可視化實時操作。同時利用OMAP4430異構多核處理器內部協處理核Cortex-M3、IVA-HD 多媒體引擎加快720P H264視頻編碼效率,提高了無線視頻服務的實時性的可視化遠程遙控移動機械手設計。
機械手在現代社會已經廣泛應用于制造業,航空航天業,軍事業,同時也將進入服務業,移動機械手是近年來迅速發展起來的高新技術密集的機電一體的產品。隨著社會生產技術的飛速發展,移動機械手的應用領域不斷擴展。從自動化生產線到海洋資源的探索,乃至太空作業等領域,機械手已成為高技術領域內具有代表性的戰略目標。然而就目前的機械手技術水平而言,機械手在信息的獲取、處理及控制能力等方面都是有限的,對于復雜的工作任務及多變的工作環境,機械手的能力更顯不足。隨著移動互聯網時代的到來、嵌入式技術及軟件技術的快速發展,越來越多的高性能嵌入式芯片的出現,嵌入式操作系統的快速發展,并且應用到嵌入式處理器中,促進了移動機械手向更加向智能化方向發展。本文以TI公司的OMAP4430異構多核處理器為核心,Android手機為控制終端,實現了一款基于搖桿手柄操作的可視化移動機械手。
控制終端Android手機響應搖桿事件控制移動機械手操作。同時借助OMAP4430異構多核處理器在視頻編解碼上的強大優勢實現了對720P視頻的實時無線傳輸。為了提高移動機械手的控制精度和相應速度,采用直流馬達驅動機械手運動并采用實現180級別角度和速度的7個AX-12馬達來提供更大的力矩。最后通過實驗來驗證本次設計的可行性。
控制終端Android手機響應搖桿事件控制移動機械手操作。同時借助OMAP4430異構多核處理器在視頻編解碼上的強大優勢實現了對720P視頻的實時無線傳輸。為了提高移動機械手的控制精度和相應速度,采用直流馬達驅動機械手運動并采用實現180級別角度和速度的7個AX-12馬達來提供更大的力矩。最后通過實驗來驗證本次設計的可行性。
1 硬件平臺
本次設計的可視化遠程遙控移動機械手硬件部分主要分為OMAP4430開發板、Android手機、車體及機械手馬達三部分。
1.1 OMAP4430開發板
OMAP4430 是TI公司的實現了高性能和低功耗完美平衡的Soc,其內部主要包括四個處理引擎:基于ARMv7l指令集的SMP Cortex-A9 1Ghz雙核處理器,可編程多媒體硬件加速引擎IVA-HD及協處理核Cortex-M3,高性能的圖像顯卡Power SGX540及提供圖像視頻并行計算的ISP。其中IVA-HD多媒體加速引擎內部有7個針對各種視頻編解碼而設計的加速引擎,能夠實現對720P視頻的實時編解碼。其內部示意圖如圖1所示:
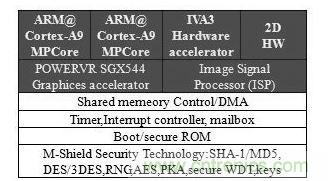
圖1 OMAP4430內部引擎示意圖
1.2 Android平臺
Android是一個以Linux為基礎的開放源代碼移動設備操作系統,主要用于移動設備,由Google成立的Open Handset Alliance持續領導與開發中。Android具有開源、良好的可移植性等成為全球第一大智能手機操作系統。本次設計Android手機采用聯發科Cortex-A7處理器,支持無線網卡AP熱點,支持H264硬解碼。
1.3 移動機械手
移動機械手由運動小車和機械手組成,運動小車負責地面移動,而機械手通過旋轉6個馬達關節來完成捉取地面目標任務。
1.3.1 移動小車
利用高性能MCU ATmega128L芯片通過傳感器采集當前的狀態及驅動DC馬達進行移動, ATmega128單片機為基于AVR RISC結構的8位低功耗CMOS微處理器。由于其先進的指令集以及單周期指令執行時間,ATmega128單片機的數據吞吐率高達1MIPS/MHZ,小車采用4輪驅動車輪形移動機器人,配有4個DC直流馬達及多種傳感器,具有卓越的旋轉能力和穩定性好的特點,小車控制框架如圖2所示:
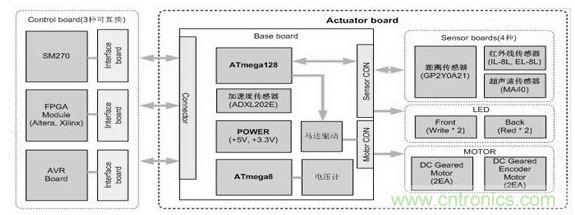
圖2 小車運動控制示意圖
[page]
1.3.2 機械手
機械手由6個AX-12馬達組成,AX-12馬達具有180級別位置和速度控制、位置角度和速度的實時反饋、內部溫度或力矩超出范圍時給予警告提示等優點。第一個馬達的關節負責機械手360度旋轉,第二個關節的同時控制兩個馬達,這個關節在提起和放下物體時提供了必須的扭矩,因此通過控制兩個馬達補充扭矩大小的不足,而第三第四個馬達提供了機械手捉取目標時前伸和后縮所需的力矩,第五個馬達則是手腕旋轉馬達,用于旋轉最后一個馬達的空中角度。最后一個馬達的旋轉將推動夾子張開和閉合來捉取地表目標。通過這6個馬達的機械臂,可向所有方向移動并進行多樣化的動作實驗。
1.4 系統硬件框架
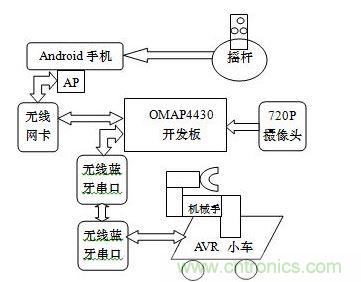
圖4 系統硬件框架圖
2 軟件設計
系統軟件設計包括Android手機應用、OMAP4430開發板Linux控制服務端和無線視頻服務軟件設計、AVR單片機程序設計,系統軟件框架如圖5所示。
Android應用主要負責接收手柄水平、豎直方向的搖桿時間和手柄按鍵事件、實時分析處理事件、將結果通過Socket發送給OMAP4430開發板。同時Android將實時接收經過OMAP4430開發板通過H264算法壓縮的720P視頻流并通過硬解碼技術將解碼緩存繪制到控制界面上。
OMAP4430開發板搭載Linux3.9.11操作系統,通過無線網卡Socket編程與Android手機建立通信,它主要負責接收Android平臺發過來的控制命令并進行處理后將數據通過無線藍牙串口發送給AVR單片機控制移動機械手的運動和馬達操作。利用OMAP4430異構多核處理器在視頻編解碼上的強大優勢,通過USB攝像頭采集720P分辨力的視頻幀通過libdce庫利用內部的IVA-HD多媒體硬件加速引擎進行H264編碼,并將編碼視頻緩存流通過無線網卡Socket通信發送到Android手機進行顯示。
而底端AVR單片機則負責接收OMAP4430發過來的控制命令來操作4個直流電機進行運動、同時將通信數據進行解析成機械馬達旋轉速度及角度械手的動作來完成任務。
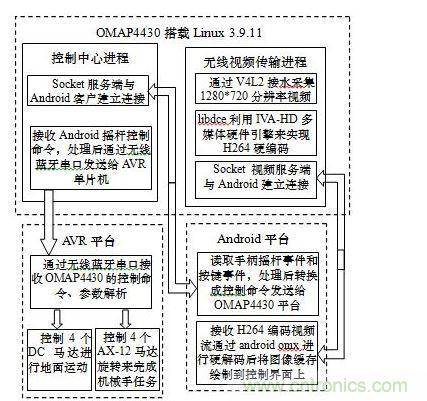
圖5 系統軟件框架圖
[page]
2.1 移動機械手單片機軟件實現
移動機械手的控制核心為ATmega128L單片機,其內部通過時鐘產生變換PWM來控制4個DC電機旋轉從而實現機械手的移動。同時內部有兩個UART串口,分別與OMAP4430通信的藍牙串口和控制AX-12馬達旋轉的串口。其軟件流程如下:
1)寄存器初始化:包括初始化時鐘定時器、端口輸入輸出初始化、設置LED控制寄存器等
2)打開藍牙串口和與AX-12通信串口,設置串口的波特率、奇偶校驗、停止位等屬性
3)藍牙串口接收OMAP4430發過來的控制參數,并進行參數解析處理。如果為運動控制參數,則通過PWM_change()修改PWM來控制機械手運動方向,如果為機械手設置參數通過Ctrl_Array_MT()設置每個AX-12馬達的旋轉角度和旋轉速度來完成捉取目標任務。
4)讀取AX-12馬達的溫度及力矩,如果超出預定范圍則調整馬達速度和力矩并向OMAP4430開發板發出提示信息。機械手動作控制命令如表1所示:
52.2 Android應用軟件設計
2.2.1 搖桿手柄事件處理
搖桿手柄采用USB OTG方式連接到Android手機,Linux內核已經包括其驅動程序。手柄的水平豎直搖桿事件和按鍵事件都將觸發MainActivity的onKeyDown()函數和onGenericMotionEvent()函數的調用,在函數中分析事件對象的屬性(觸發按鍵ID、事件類型)進而向OMAP4430發出不同控制命令。其參考代碼如下:
boolean onKeyDown(int keyCode, KeyEvent event)
{if(event.getSource()==InputDevice.SOURCE_JOYST ICK || event.getSource()==1281) //手柄按鍵事件
{ if(event.getAction()==KeyEvent.ACTION_DOWN)
{ int keycode=event.getKeyCode();
swicth(keycode)
{ case KeyEvent.KEYCODE_BUTTON_1:
……. break; //ID=1按鍵按下觸發的事件
case KeyEvent.KEYCODE_BUTTON_2:
case KeyEvent.KEYCODE_BUTTON_3:
default:break;}}}}
boolean onGenericMotionEvent(MotionEvent event){
if(event.getSource()==InputDevice.SOURCE_JOYSTICK)
{ //手柄搖桿事件
float Raw_x=event.getRawX(); //水平方向偏移
float Raw_y=event.getRawY(); //豎直方向偏移
}}
2.2.2 Android H264解碼
Android從4.1版本加入了H264視頻硬解碼API,其MediaCodec內部封裝了openMax庫進行多媒體硬解碼加速,openMax是一個開源、跨平臺的多媒體編解碼加速API[5],包括openMax應用層、openMax集成層、openMax開發層。其解碼h264的步驟包括:
1)通過MediaCodec.createDecoderByType(“video/mp4v-es”)創建H264解碼對象
2)mediacodec.configure(format,…..)配置H264解碼器的參數,包括圖像分辨率,視頻幀格式、H264視頻流的頭信息等
3)mediacodec.dequeueInputBuffer()獲取可用緩存指針,將接收的H264編碼拷貝到該緩存中,mediacodec.queueInputBuffer()將緩存送入解碼器的緩存隊列中
4)查詢等待解碼器完成,dequeueOutputBuffer()將解碼后的圖像緩存出隊,并通過Surafce顯示接口將圖像繪制到控制界面上
[page]
2.3 Linux控制進程及無線視頻服務
OMAP4430開發板運行Linux3.9.11操作系統,具有實時性強、良好移植性等優點。利用Andriod手機無線網卡創建一個AP熱點,OMAP4430 開發板的無線網卡將連接到AP上,二者通過網絡進行數據通信。
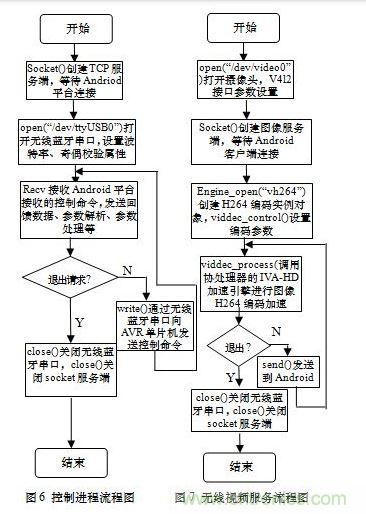
控制進程將創建一個TCP Socket服務端,等待Android應用連接,同時打開無線藍牙串口設備/dev/ttyUSB0設備,設置串口屬性(115200波特率、8位數據、無校驗等)。在連接建立之后循環接收Andriod發過來的控制命令并進行命令解析處理,處理結果將通過藍牙串口發送給AVR單片機來控制移動機械手。
無線視頻傳輸進程將通過V4L2編程接口調用USB攝像頭采集1280*720視頻幀(采集速度為30幀每秒)。利用OMAP4430異構多核處理在多媒體視頻編解碼強大運算能力,通過libdce庫的engine_open()、engine_create()、viddce_control()、viddec_procees()函數創建H264編碼實例并通過RPMsg消息總線遠程調用協處理核的IVA-HD的加速引擎來提高視頻編碼效率。為了減小網絡帶寬需求、提高無線傳輸效率,本次采用Baseline、 Level3.2編碼級別。最后將H264編碼緩存通過無線網卡Socket服務端發送到Android客戶端進行解碼顯示。控制進程和無線視頻傳輸進程的流程如圖6、7所示:
3 測試

表2 無線視頻傳輸實時性測試
由于借助異構多核處理器OMAP4430內部的協處理核Cortex-M3和IVA-HD多媒體硬件引擎來實現H264編碼加速,因此本次720P無線視頻傳輸實時性較高,達到了28幀每秒。
4 結語
針對移動機械手控制方式復雜,環境周圍信息獲取能力不足的缺點,采用Android手機為控制中心,搖桿手柄為輸入設備實現了移動機械手的可視化實時操作。同時利用OMAP4430異構多核處理器內部協處理核Cortex-M3、IVA-HD 多媒體引擎加快720P H264視頻編碼效率,提高了無線視頻服務的實時性。實踐證明系統具有人機交互方式友好、控制簡單、多核間負債平衡、無線視頻服務實時性強等優點。


